Tapo 로봇 청소기가 충전되지 않을 때 해결 방법
1. 충전독의 위치를 확인합니다.
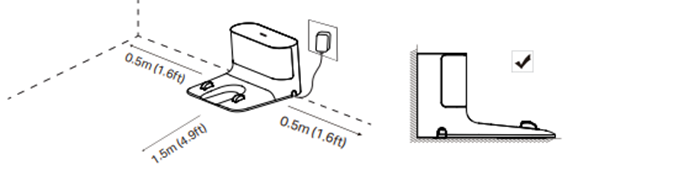
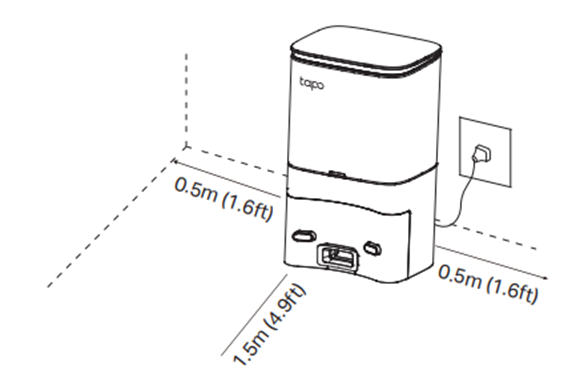
충전 독을 전면1.5 m, 좌우 0.5 m 이내에 장애물이 없는 평평한 표면을 찾아 벽에 붙여 놓습니다. 충전독의 전원이 연결되어 있는지 확인하세요.
2. 로봇 청소기를 충전 독 1m 앞에 놓습니다. 그런 다음 충전을 시작하여 로봇 청소기가 충전 독을 찾을 수 있는지 확인합니다.
이 단계에서는 충전 독 또는 로봇 청소기의 충전 모듈 결함으로 인해 발생하는 문제를 해결합니다. 로봇 청소기가 충전 독으로 복귀하지 않는 경우, 해당 동영상을 찍어 기술 지원 팀에 문의해 주세요.
3. 충전 독에서 로봇 청소기를 시작하는 것이 좋습니다.
RV10 시리즈는 관성 항법 장치(INS,inertial navigation system)를 사용합니다. 충전 독에서 청소를 시작하면 충전 효율을 높여 충전 독의 위치와 청소 경로를 보다 정확히 기록합니다.
4. RV10 시리즈의 경우, 청소 중에 진공 청소기를 옮기지 않는 것이 좋습니다.
현재 위치는 이동 후 재배치할 수 없습니다. 현재 청소 경로 기록이 손실되어 충전 효율이 떨어집니다.
5. 실내에 카펫 및 선풍기 받침대, 문지방, U자 모양 테이블/의자 다리와 같은 장애물이 있는지 확인합니다.
RV10 시리즈는 관성 항법 장치(INS,inertial navigation system)를 사용합니다. 장애물-교차 높이가 2 cm인 경우 이러한 장애물로 인해 로봇이 장애물 위를 반복적으로 오르내릴 수 있습니다. 카펫에서는 로봇 청소기의 바퀴가 미끄러질 수 있습니다. 이러한 장애물은 자이로와 같은 센서의 오류로 이어질 수 있으며, 청소 경로 기록이 잘못될 수 있습니다. 이는 관성 항법 장치 모델의 일반적인 문제입니다.


6. 충전 독의 위치를 변경하고 다시 확인합니다.
위 단계를 모두 수행한 후에도 문제가 지속되는 경우 TP-Link 기술 지원팀에 문의하세요.
해당 FAQ가 유용했나요?
여러분의 의견은 사이트 개선을 위해 소중하게 사용됩니다.


